Dynamics equation (Lagrangian)
https://x.com/CezaryStorczyk/status/1740336875901255905?s=20
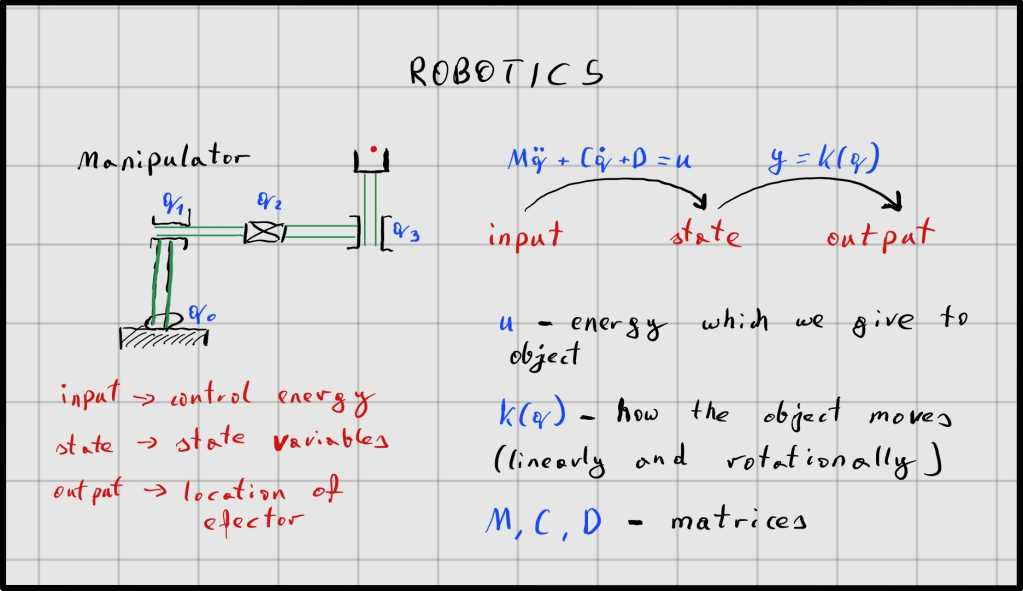
The dynamics equation Mq” + Cq’ + D = u (Lagrangian) is the basis for conducting control algorithms for the manipulator. The kinematics equation shows how the output changes for specific states (q0, q1, q2, q3).
Pseudo-inertia matrix
https://x.com/CezaryStorczyk/status/1741929935986377105?s=20
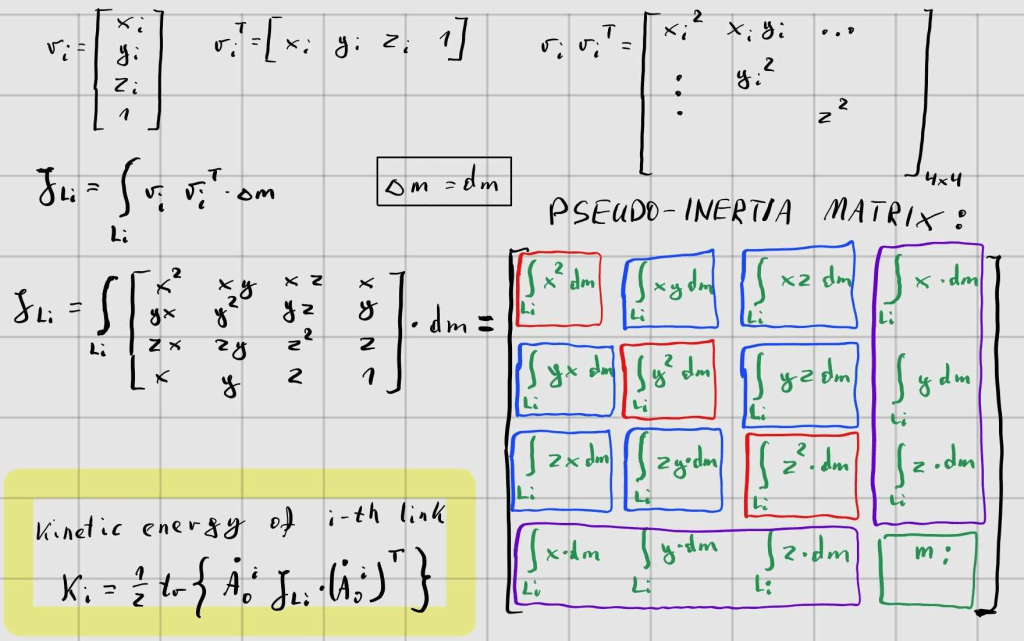
The pseudo-inertia matrix is the equivalent of the mass and moment of inertia of a link. We use it to describe the dynamics of elements.
-> Main moments (of inertia) in red.
-> Deviation moments (describing phenomena related to lack of symmetry) in blue.
-> Coordinates of the center of mass in purple.
-> Total mass of the link in green.
Pseudo Inertia matrix of a uniform rod
https://x.com/CezaryStorczyk/status/1742193994346504239?s=20
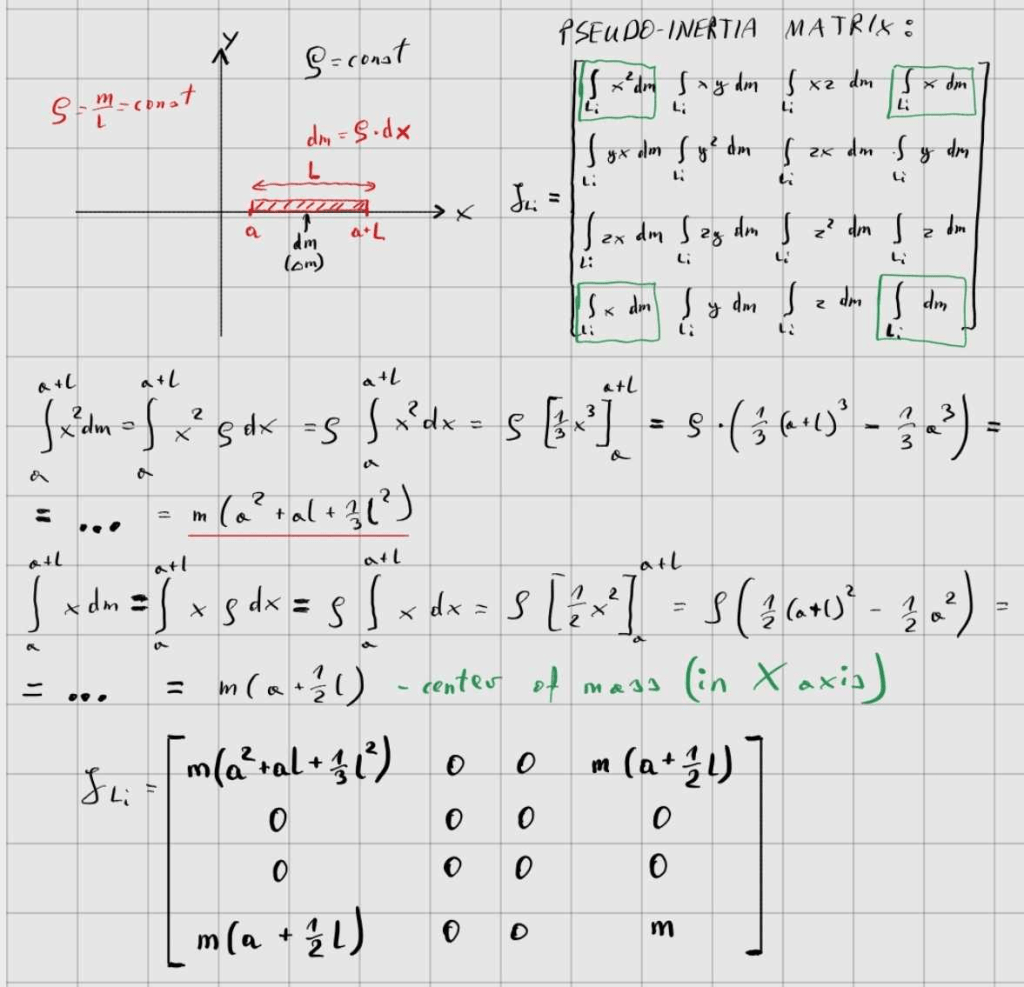
Calculate the pseudo inertia matrix of a uniform rod of length l and mass m, placed between the points (a,0,0)T, and (a+l,0,0)T.
We treat the rod as a one-dimensional element, meaning that its mass extends only in the X dimension. Other dimensions are negligible for analysis. This means that in the pseudo inertia matrix, we only consider elements that do not contain either Y or Z. At the same time, it is immediately apparent that the moments of deviation are zero, as the rod is symmetrical.
Reinforcement Learning
https://x.com/CezaryStorczyk/status/1827031185207234722?s=20
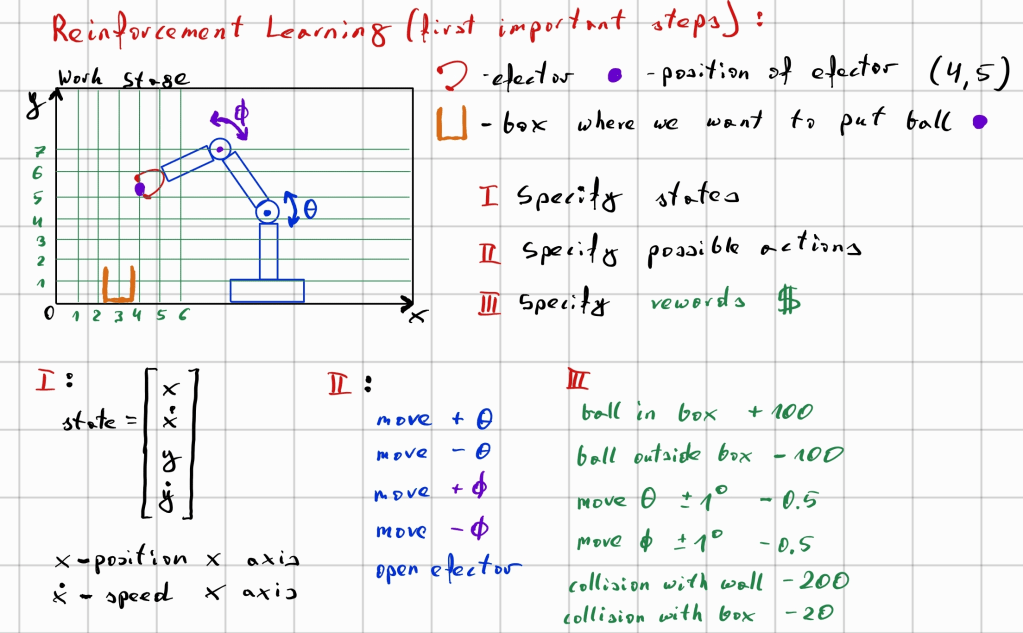
First steps to specify Reinforcement Learning Algorithm:
- Specify Possible states
- Specify Possible Actions
- Assign Rewards
